FTC – 10/12/23
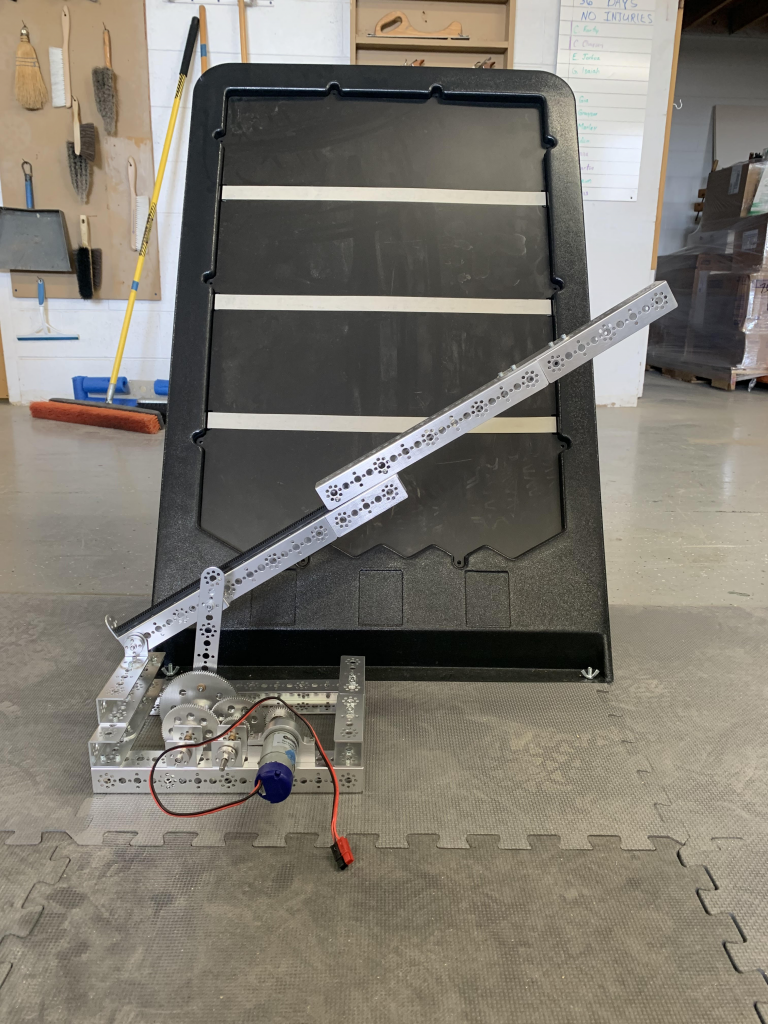
Building the claw: Progress is being made to the arm and structure of the claw. There are three different design prototypes being made. Ryan Hostetter continues to work on a prototype design of the claw, creating a visual representation of the arms formation. Connecting the server to the axle will help to reinforce the stability and motion control. This adjustment with the claw has allowed for the arm to move and reach ground level as well as about a foot and a half of space upwards.

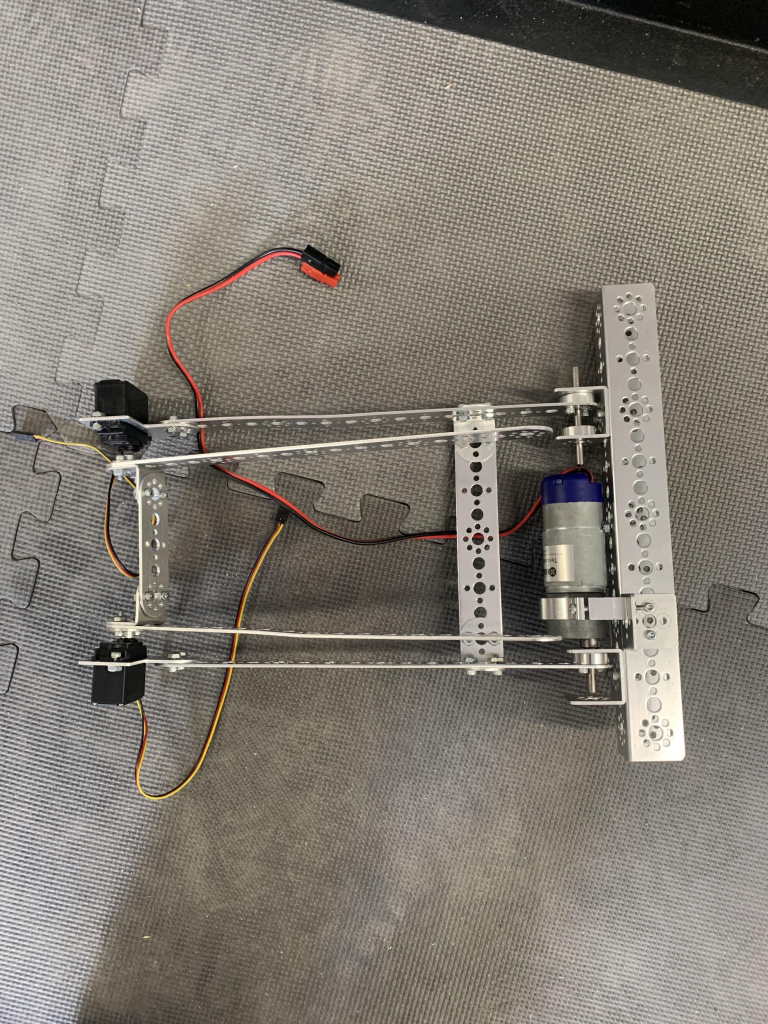
Additionally, another member of the team, Jedrek Sneary also continues work on another one of the claw prototypes. The main idea of the build is so that it will allow the arm to be compact and more controlled in size. This prototype will also permit the arm to have higher speeds and a longer reach of the claw. When going through the obstacle course, lifting up bars in some areas would become a flaw to the robot, so making a more compressed arm is an adaptation that will minimize room for error on the course.

Early design of prototype number one of the arm structure
Base Building with Calvin Bixler: Adjustments made to the arrangements of the base grant the robot more structural support. Furthermore, pistons have been incorporated into the build to strengthen the base support and mechanical fluidity of the robots motions. This will help to stabilize the arm to be able to move pixels with ease in the arena during competitions. The mobility of the robot’s base is responsive with the wheels and motor when in command.
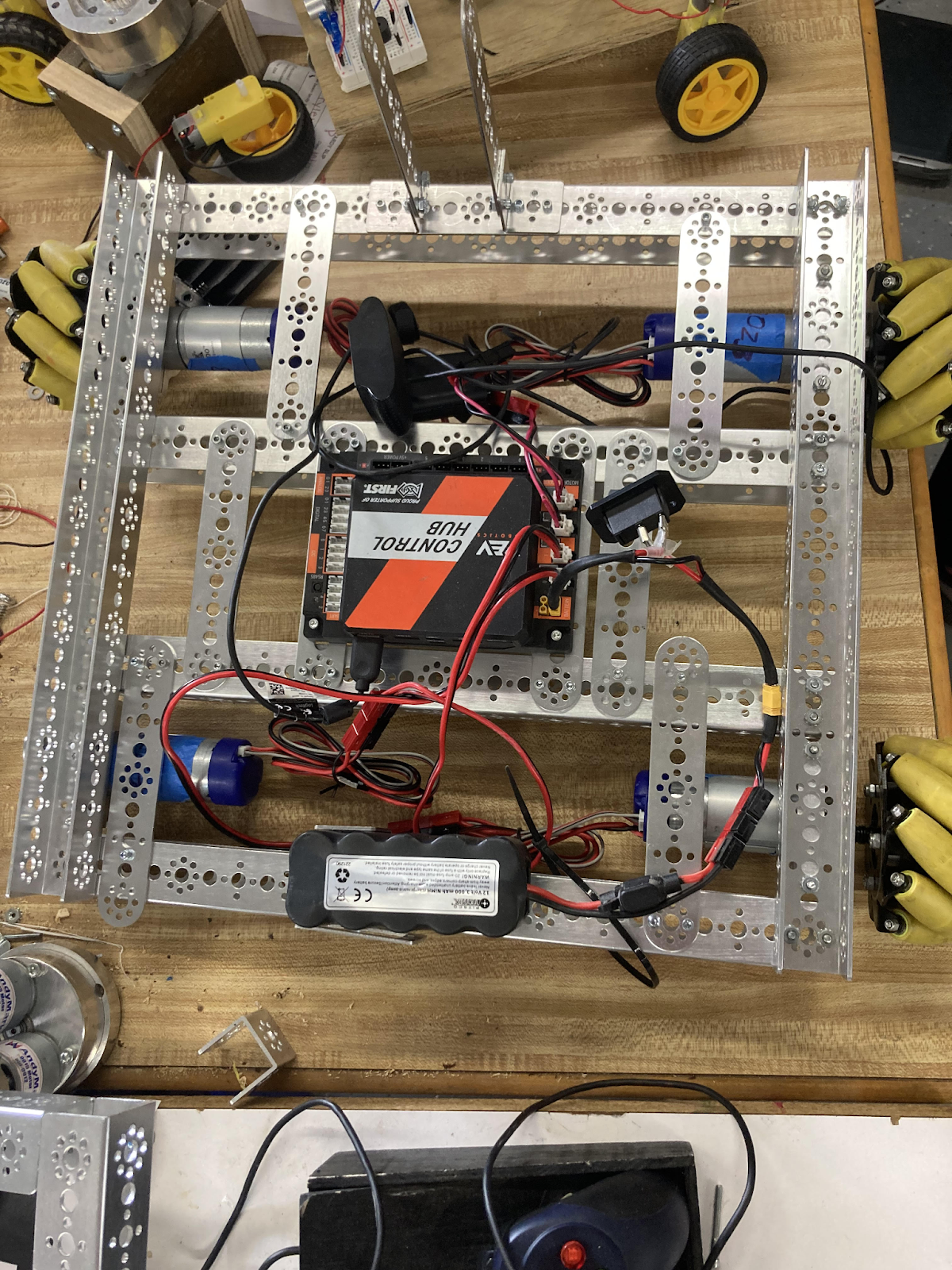
Base structure of the bottom of the robot

Progression of prototype number three

New and improved prototype model of the claw design number one
The coding of the motions and controls have been successful! From the remote control of the robot, it can now send commands and receive the intel to do the requested movements. Three designs for the claw have been made and voted upon. The decision to use the first arm design ( made by Jedrek Sneary ) was agreed on. This model meets the requirements of the build and has almost perfect compaction, high speeds, long range, and a light weight build. Even though the stability of the arm has yet to be improved, lots of progress has been made to the structural aspects of the robot.
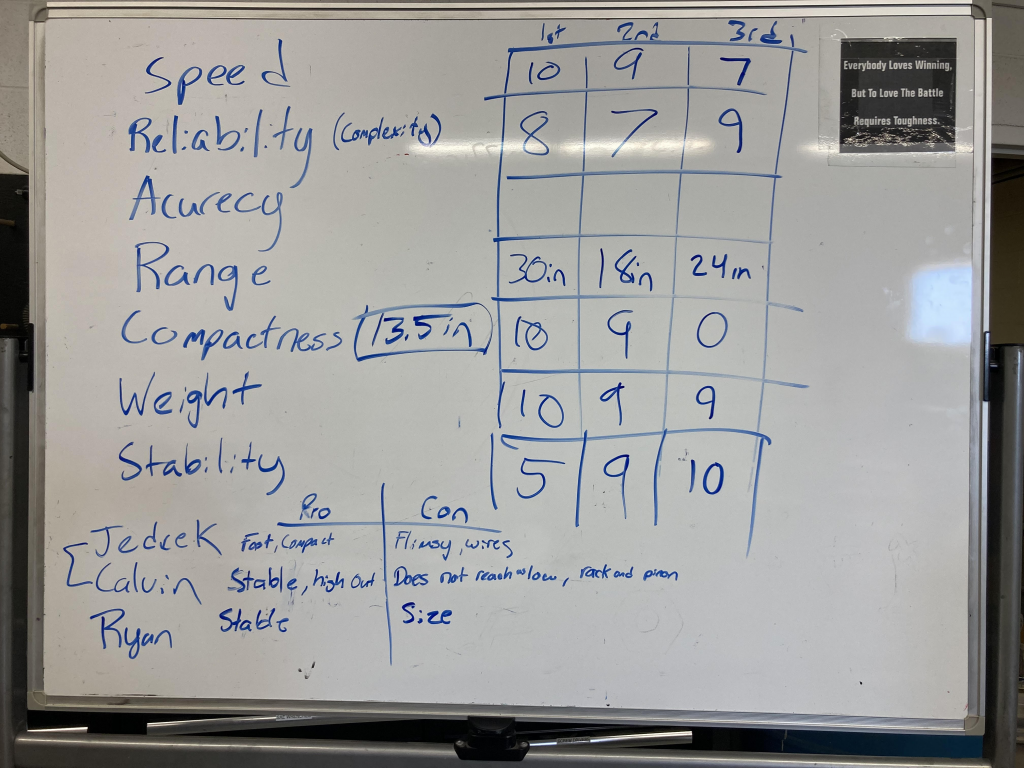
The trials of the three arms prototypes
This is prototype number one, it was made by Jedrek Sneary and was voted on to be the arm for the robot. It has a light weight and very compact body, with fast mechanical movements, and a long range of accessibility, however it lacks stability and durability in some areas.
This is the second prototype of the arm, made by Calvin Bixler. This is a more complex build design which means it was very reliable, stable, and additionally was very compact in size. Yet, it is slightly heavier and had the shortest range of accessibility.

The third prototype of the arm was made by Ryan Hostetter. This design was very reliable and had the most stability among the arm designs. It was swift and simple in terms of complexity and a wide range of accessibility. But it was not very compact and so it’s size was a huge limiting factor to the prototype design.
Leave a Reply